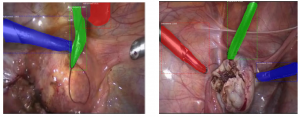

En esta propuesta se plantea un concepto de asistente robótico autónomo capaz de asistir al cirujano de forma autónoma durante una intervención de colecistectomía, basado en la generación de un mapa semántico del entorno y un algoritmo de aprendizaje profundo que genera los movimientos del robot. Se plantea la colecistectomía como escenario colaborativo porque es una intervención estándar que se realiza mayoritariamente mediante abordaje laparoscópico. Además, durante esta intervención el cirujano requiere de la colaboración de un asistente que maneja una herramienta auxiliar. La maniobra que realiza el auxiliar consiste en pinzar la vesícula biliar y retraerla superiormente para dejar expuesta la zona de trabajo sobre la que opera el cirujano, que se encarga de liberar la vesícula. Una vez liberada, el asistente retira la vesícula por uno de los orificios de entrada del instrumental quirúrgico. La automatización de la herramienta auxiliar liberaría a un asistente humano de realizar esta tarea. Además, a nivel tecnológico, supone un ambicioso reto que implica la colaboración directa y continua entre el asistente robótico y el cirujano.
En base al planteamiento anterior, en esta propuesta se propone la implementación y desarrollo de un asistente robótico quirúrgico autónomo que contenga las siguientes funcionalidades:
- Generación de un mapa geométrico del entorno quirúrgico capaz de identificar y localizar el instrumental quirúrgico y las estructuras anatómicas presentes en la imagen endoscópica.
- Generación de un mapa semántico del entorno capaz de dotar de contenido conceptual el mapa geométrico generado.
- Asistencia autónoma colaborativa durante una intervención de colecistectomía que no requiera la intervención directa del cirujano, basada en la generación de movimientos mediante un algoritmo de aprendizaje profundo, que tenga como entrada la salida de los mapas geométrico y semántico del entorno y el estado del robot, y proporcione un comando de movimiento que maximice el desempeño a largo plazo del robot.
El esquema funcional de este asistente robótico se muestra en la Figura 1.
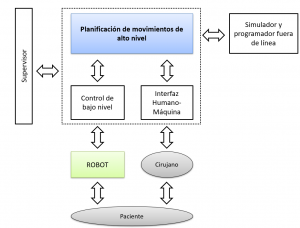
Figura 1
El objetivo general de la presente propuesta de proyecto se plantea como:
Establecer los procedimientos, técnicas y tecnologías necesarias para la implantación de un sistema robótico colaborativo capaz de asistir de forma autónoma al cirujano mediante el control de la herramienta auxiliar durante una intervención de colecistectomía laparoscópica. La planificación de movimientos de dicho asistente estará basada en un algoritmo de aprendizaje profundo por refuerzo en el que la representación del entorno se define mediante el estado actual del robot, y la generación de un mapa geométrico capaz de identificar estructuras anatómicas y un mapa semántico que proporciona un sentido conceptual a la imagen endoscópica.
Para lograr este objetivo general se establecen los siguientes objetivos específicos, que se relacionan entre sí siguiendo el esquema de control de la Figura 2:
- Objetivo 1: Diseño y desarrollo de un mapa geométrico del entorno quirúrgico durante una intervención de colecistectomía. Este objetivo comprende un algoritmo de clasificación y localización de los elementos que componen el entorno quirúrgico basado en arquitecturas de Deep learning. Así, la salida del mapa geométrico serán las características geométricas (posición, orientación y área) de los objetos identificados en la imagen endoscópica.
- Objetivo 2: Diseño y desarrollo de un mapa semántico capaz de interpretar el entorno para dar un sentido conceptual a la imagen endoscópica. El mapa semántico se implementará mediante un sistema de inferencia basado en lógica de predicados que, a partir del análisis geométrico de la imagen realizado en el objetivo anterior, proporcione el conjunto de funciones semánticas o predicados que definen el entorno en un determinado instante.
- Objetivo 3: Diseño y desarrollo de un algoritmo de aprendizaje profundo por refuerzo para la planificación de movimientos de alto nivel de un asistente robótico autónomo que maneja la herramienta auxiliar durante una intervención de colecistectomía. La política que define la acción del robot para un determinado estado del entorno se definirá mediante una red neuronal entrenada previamente, cuyos pesos se modificarán mediante un algoritmo de aprendizaje por refuerzo que buscará los valores óptimos de los mismos en función del refuerzo obtenido para cada conjunto de observaciones del entorno.
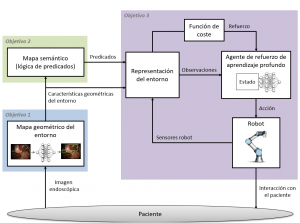
Figura 2
Durante la ejecución del proyecto se han conseguido los siguientes resultados de impacto en las tecnologías básicas identificadas en la guía estratégica europea Multi-Annual RoadMap for Robotics (MAR) para el horizonte H2020:
- Percepción: se ha desarrollado un mapa geométrico del entorno con la segmentación del instrumental quirúrgico y de la vesícula biliar, que constituye el órgano de interés a la hora de automatizar la herramienta auxiliar durante una colecistectomía laparoscópica. Este mapa geométrico se puede utilizar para futuras investigaciones que vayan en la línea de la automatización de tareas en procedimientos laparoscópicos.
- Cognición: se ha desarrollado un sistema de inferencia semántica del entorno quirúrgico durante una intervención de colecistectomía basado en la definición de movimientos básicos mediante la tupla <instrumento, verbo, objetivo>. Este mapa semántico sirve de base para seguir profundizando en la interpretación del entorno quirúrgico, y por tanto, para seguir avanzando en el desarrollo de estrategias colaborativas persona-máquina en este tipo de entornos.
- Navegación: se han desarrollado estrategias de planificación de movimientos basadas en técnicas de aprendizaje profundo en la que se ha hecho uso de las salidas del mapa semántico para implementar la función de refuerzo.