

El objetivo general de este proyecto se centra en el desarrollo de tecnologías para dotar a un asistente robótico de cirugía hepática laparoscópica de habilidades para ayudar en la resolución de situaciones de sangrado que se produzcan durante la cirugía, así como en el manejo tanto de una sonda de ultrasonidos intraoperatoria como del endoscopio. Todas estas funcionalidades se integrarán y validarán bajo un esquema cognitivo.
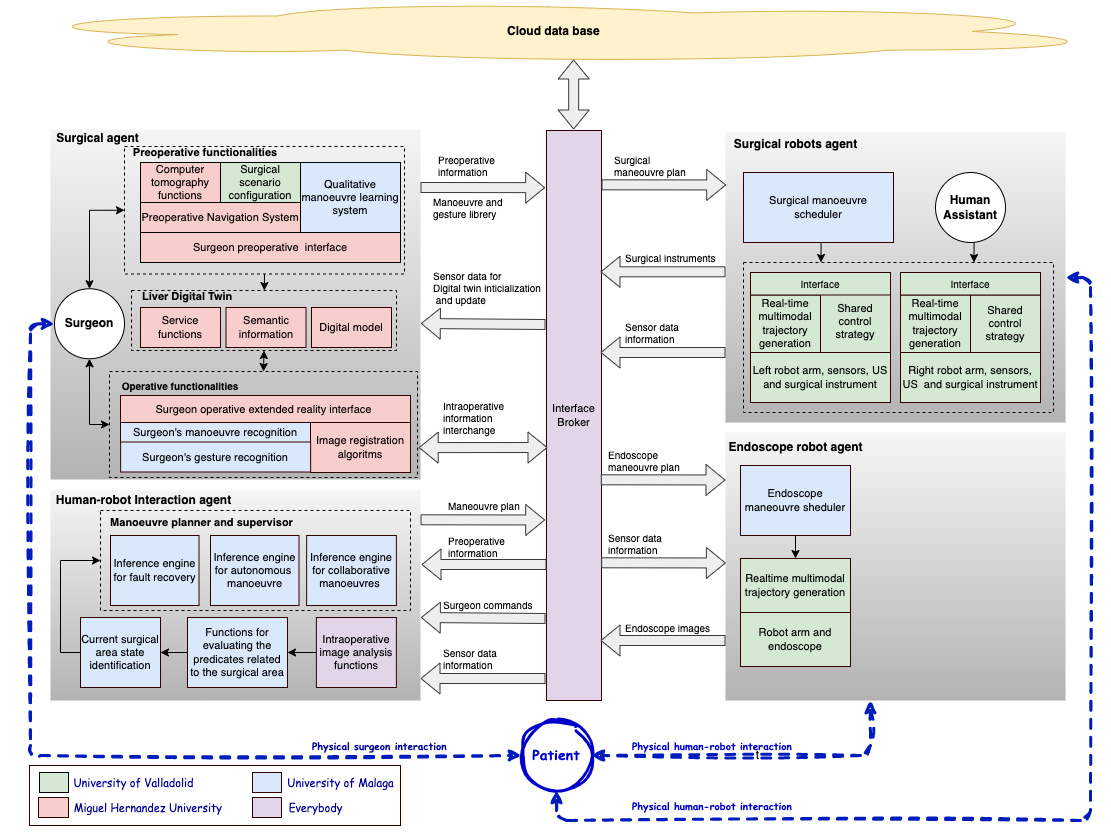
El concepto para llevar a cabo este objetivo general se detalla en la Figura 1. Esta figura muestra un asistente robótico compuesto por un brazo manipulador dedicado al manejo del endoscopio (Endoscope robot), dos brazos adicionales (Left surgical robot y Right surgical robot) para dar asistencia en la resolución de situaciones de sangrado y para manejar el instrumental quirúrgico, incluida la sonda de ultrasonidos intraoperatoria. Estos tres brazos manipuladores acceden a la zona quirúrgica colocándose a los lados del paciente, de forma que el cirujano se sitúa entre las piernas del paciente, y el ayudante a un lado junto a uno de los brazos manipuladores. El cirujano realiza la cirugía laparoscópica de forma convencional, mientras que el asistente colaborará con el sistema robótico en determinadas situaciones. Por último, el módulo de interacción persona-máquina proporciona las capacidades de planificación supervisada de las maniobras de los manipuladores e incluye la interfaz del cirujano con funcionalidades preoperatorias y operatorias.
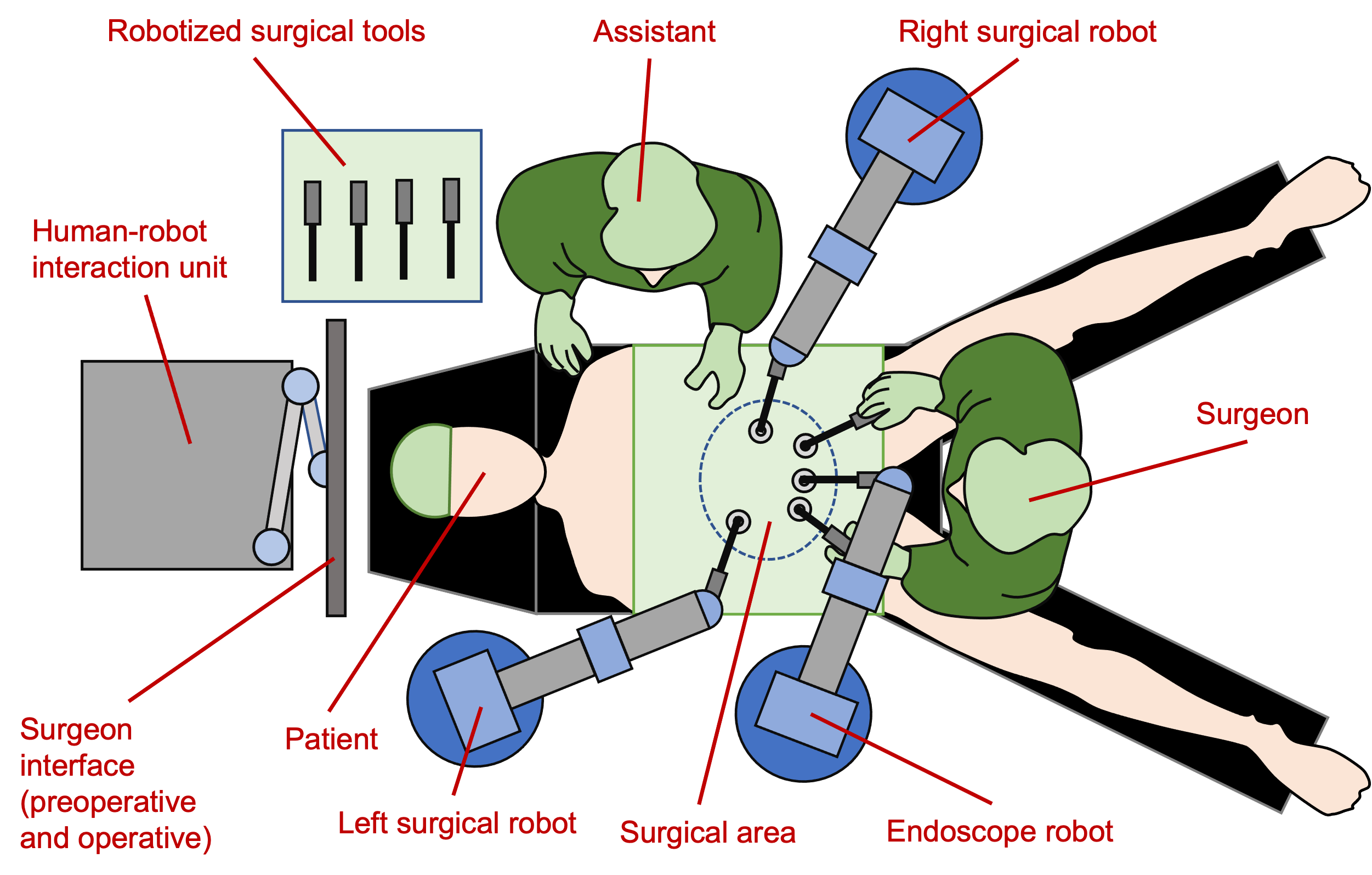
Figura 1. Concepto de la plataforma robótica para asistencia en cirugía laparoscópica del hígado
El sistema robótico funcionará en dos etapas diferentes, una preoperatoria y otra operatoria, que serán gestionadas por el módulo de interacción persona-máquina. En la primera etapa, el sistema proporciona las funcionalidades para configurar el espacio quirúrgico y una interfaz de navegación, que permite al cirujano planificar determinadas maniobras y definir la interacción con los brazos robóticos. Por otro lado, incluye un sistema de aprendizaje que enseña a los robots a realizar tanto las maniobras de asistencia al sangrado como los movimientos intraoperatorios de la sonda de ultrasonidos. En la fase operatoria, el sistema robótico puede detectar situaciones de sangrado en el hígado, localizar el origen y activar la asistencia robótica (acciones autónomas de los robots y otras en colaboración con el asistente o cirujano) que tendrá en cuenta el origen y la gravedad de la hemorragia. Este asistente robótico realiza la maniobra autónoma según el aprendizaje preoperatorio, que se complementa utilizando realidad aumentada para facilitar la actuación del cirujano. Asimismo, el módulo de interacción persona-robot supervisa las acciones de los robots, de forma que, en caso de fallo, puede replanificar la maniobra o solicitar la ayuda del asistente para mover un brazo directamente mediante teleoperación asistida.
De este modo, para alcanzar el objetivo general propuesto, se definen los siguientes objetivos específicos:
- OE1: Diseño y desarrollo de metodologías de planificación de tareas basadas en una arquitectura cognitiva, con capacidades de supervisión, que coordine la colaboración humano-robot durante la resección hepática. Utilizará información del paciente y tendrá capacidad para aprender maniobras de asistencia al sangrado y manejo de sondas de ultrasonidos intraoperatorias en la fase preoperatoria. En la fase operatoria, estas metodologías identificarán el estado actual del campo quirúrgico, así como las maniobras del cirujano para llevar a cabo la coordinación humano-robot durante una tarea de detención de hemorragias. Además, planificará los movimientos coordinados de los brazos robóticos y supervisará sus acciones para replanificarlas en caso necesario.
- OE2: Diseño y desarrollo de métodos para la construcción de un gemelo digital hepático personalizado para cada paciente. De este modo, deberán desarrollarse nuevos algoritmos para la definición tridimensional digital del hígado a partir de un TAC preoperatorio. Incluirá su anatomía (segmentos y vascularización), así como los posibles tumores. Utilizará modelos deformables que emulen el comportamiento del órgano bajo fuerzas gravitatorias y dispondrá de información semántica sobre su estructura. También se considerará un conjunto de servicios que, mediante algoritmos de registro, actualizarán tanto la forma del hígado como la posición de sus tumores en tiempo de operación.
- OE3: Diseño y desarrollo de estrategias de generación de trayectorias en tiempo real utilizando imágenes intraoperatorias y retroalimentación fuerza-posición para la interacción con tejidos deformables. Estas estrategias deberán tener en cuenta las interacciones en el puerto de entrada de la herramienta quirúrgica (trócar) para separarlas de las fuerzas que ejerce sobre los tejidos internos. Además, se considerarán esquemas de movimiento autónomo y control compartido mediante teleoperación directa y retroalimentación háptica. Para ello, se trabajará en la robotización de las herramientas quirúrgicas y en los algoritmos para configurar la ubicación relativa de los robots en el quirófano, así como el posicionamiento de los trócares en función del tipo de resección hepática.
Para integrar los tres objetivos específicos definidos, se considera uno adicional (OE4) para la puesta en marcha de un demostrador que integre todas las técnicas desarrolladas durante este proyecto. Este prototipo será validado para alcanzar las funcionalidades descritas en la Figura 1.