
La propuesta de este proyecto presenta un concepto de sistema robótico colaborativo capaz de asistir al cirujano en un escenario de cirugía endoscópica endonasal. Este escenario parte de la información obtenida en el preoperatorio, que incluye tanto el modelo tridimensional del cráneo del paciente como la identificación por parte del neurocirujano de las zonas anatómicas de interés. Además, el sistema robótico permitirá la planificación fuera de línea de actuaciones quirúrgicas a través de una simulación y modelado de la intervención.
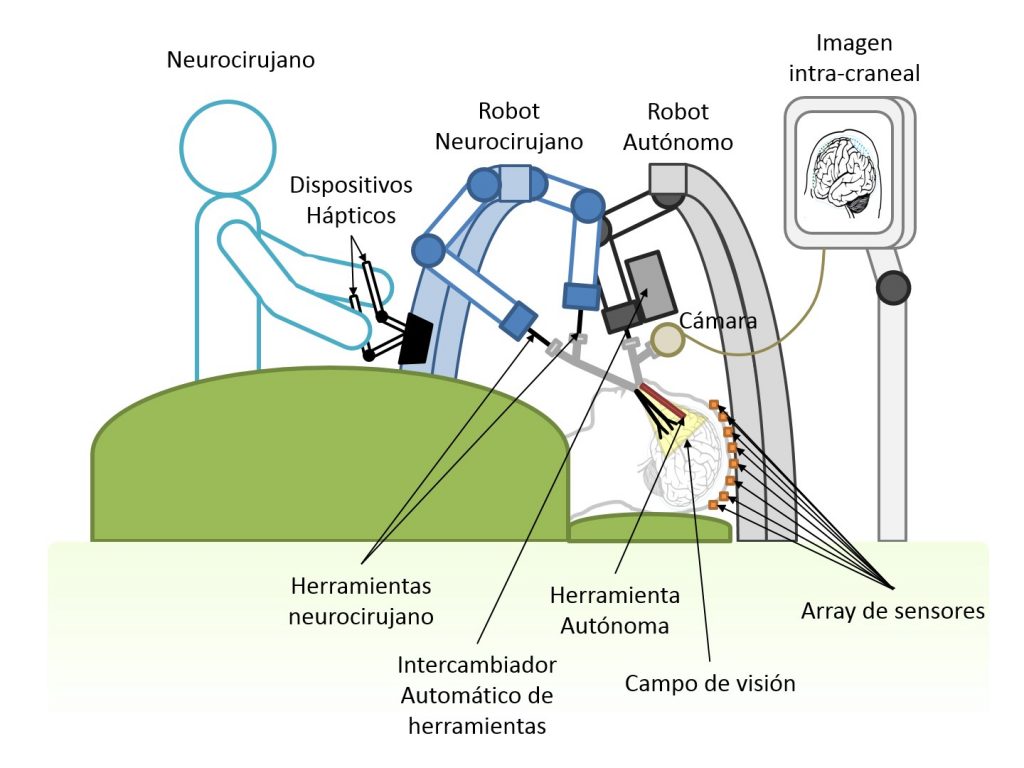
La información recopilada en el preoperatorio servirá de base para la actuación del sistema robótico durante la fase intraoperatoria tal y como se presenta en la Figura 1. Como puede observarse, las Herramientas del Neurocirujano manejadas a través de los brazos del Robot del Neurocirujano, bien en modo compartido o tele-operado con el uso de Dispositivos Hápticos, realizan las labores necesarias para liberar el camino hacia la zona anatómica de interés. A su vez, el Robot Autónomo proporcionará asistencia con un instrumento adicional navegado de forma autónoma y supervisado por el Neurocirujano en todo momento. La información obtenida de dicha supervisión se empleará en realizar un aprendizaje en línea que corrija futuras decisiones autónomas. Entre las funciones que puede desempeñar el robot autónomo se incluyen: el mapeado de actividad neurológica a través de un electrodo que indique la proximidad al tejido afectado; navegación autónoma del instrumental de aspiración; y mecanizado de la base craneal para el acceso a la zona de interés. El intercambio entre las distintas herramientas que desempeñan cada una de estas tareas se realizará a través de un Intercambiador Automático de Herramientas. Por otro lado, el robot autónomo también controla el movimiento de la Cámara y su navegación en función de la fase de la intervención, mientras que la Imagen Intra-Craneal obtenida integra los elementos de interés identificados en el preoperatorio mediante algoritmos de realidad aumentada. Estos elementos habrán visto modificadas sus localizaciones debido fundamentalmente a la perforación de la duramadre y la pérdida de presión de la cavidad craneal (brain-shift), por lo que se emplea un Array de Sensores que registre ciertos puntos del cerebro con los que corregir estas deformaciones. Todo el conjunto del sistema robótico se diseñará teniendo en cuenta criterios de ergonomía y será controlado por un sistema que incorpore tanto supervisión de faltas como corrección de las tareas quirúrgicas autónomas fruto del aprendizaje cognitivo obtenido a través de la interacción con el neurocirujano.
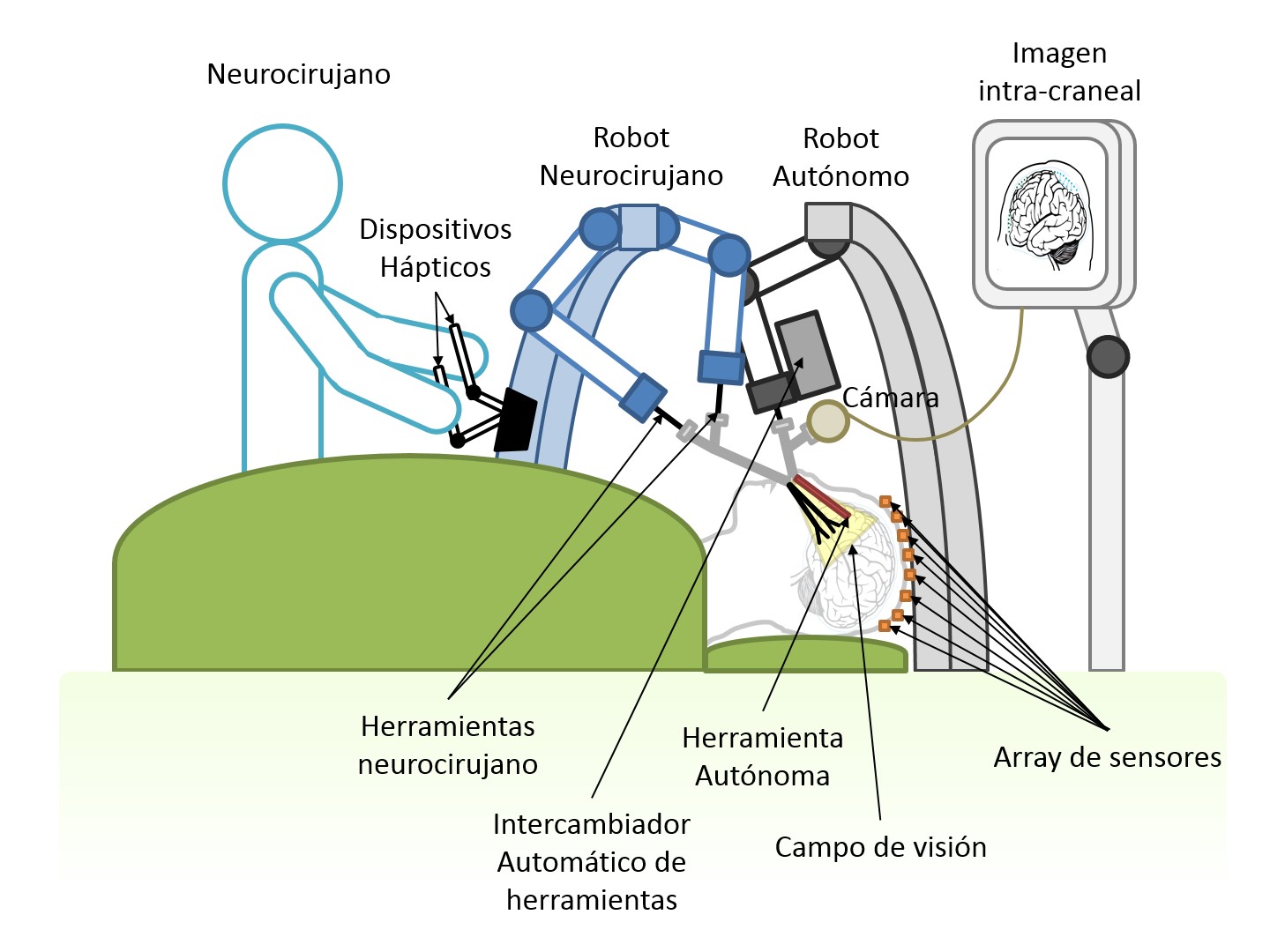
Figura 1