

El objetivo general de la presente propuesta de proyecto se planta como:
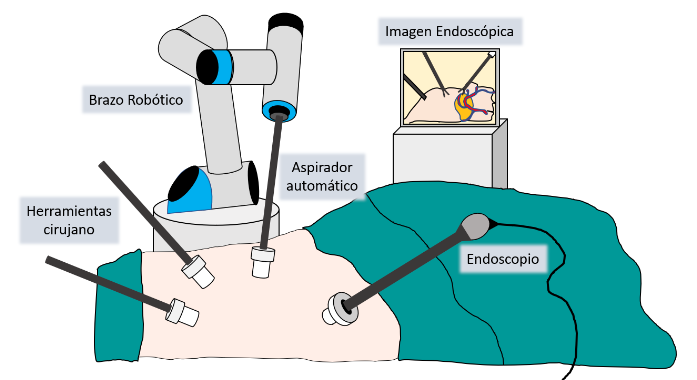
Establecer los procedimientos, técnicas y tecnologías necesarias para la implantación de un sistema robótico colaborativo capaz de asistir de forma autónoma al cirujano mediante el aspirado autónomo del sangrado durante intervenciones de cirugía laparoscópica. El sistema se fundamentará en un algortimo de detección y caracterización del sangrado y un sistema de planificación de movimientos de alto capaz de navegar el aspirador de forma segura hasta la zona de sangrado y actuarlo hasta limpiar la zona por completo, bajo la supervisión de un sistema supervisor que garantice el correcto desempeño de la maniobra.
Para lograr este objetivo general se establecen los siguientes objetivos específicos:
- Objetivo 1: Definición de los protocolos de aspirado de sangrado en entornos quirúrgicos. Se definirán los distintos tipos de sangrado que se pueden dar en una intervención quirúrgica, así como las fases que los componen, las actuaciones que debe llevar a cabo el asistente robótico para limpiar la zona afectada, y los parámetros para determinar que la maniobra ha finalizado correctamente.
- Objetivo 2: Implementación de un algoritmo de detección y caracterización de sangrado en la imagen endoscópica. Este sistema, basado en análisis de imagen mediante técnicas de aprendizaje profundo, detectará la presencia de sangrado así como la localización del mismo. Además, este algoritmo deberá proporcionar información cualitativa acerca del tipo y el estado del sangrado.
- Objetivo 3: Definición e implementación de metodologías para la planificación de movimientos de alto nivel para el aspirado automático de sangrado. Se definirán las estrategias de interacción entre el cirujano y el brazo robótico para la navegación segura del instrumental, así como las primitivas que permitan controlar la potencia de succión del aspirador automático y la fuerza ejercida sobre la superficie. Para ello, se utilizarán estrategias de aprendizaje por demostración basadas en demostraciones de cirujanos expertos.
- Objetivo 4: Integración del sistema completo y validación. Se integrará el trabajo realizado en los objetivos anteriores en un sistema supervisor que garantice el correcto desempeño de la maniobra autónoma, y que comande las acciones correspondientes al planificador de alto nivel en función del tipo y estado del sangrado. Finalmente, se procederá a realizar la validación del sistema mediante una serie de experimentos realizados en un demostrador funcional.